Jaeyoung Lim
This post is written with the work done with Modulabs DCU Lab
Introduction
Implementing a onboard computer on a small UAS can have many benefits such as being able to use ROS onboard the system. This can speed up the development process and enable to use various sensors and actuators that are supported by the ROS community. I have recently written articles on how to use MAVROS to fly a PX4 based quadrotor. However the articles do not cover operating such a system outdoors. Operating outdoors can have many issues as configuring a network or the change of localization performances and the presence of the environment. This article describes my experience on the implementation and operation of a ROS controlled MAV outdoors so that the reader can avoid the mistakes that I have made. Raspberry Pi 2 B+ was used for the onboard computer running ROS.
Results
A simple trajectory generation node was implemented to generate a circular trajectory for the quadrotor to follow. The radius was 6 m at a 15m altitude with the angular rate of 0.4 rad/s.
The video shows the comparison of the real flight with the gazebo SITL simulation. The video shows that the SITL is pretty accurate with the real flight.
Hardware Setup
Quadrotor Hardware

The quadrotor is a custom built quadrotor based on the PX4 flight stack. The quadrotor has a 8X4.5 inch props with a 1200kv motor running on a 3S Lipo. Pixhawk was used for the flight controller and the quadrotor is capable of flying and basic waypoint based autonomous missions without the existence of the companion computer.
Companion Computer
Raspberry Pi 2 B+ was used for the companion computer with the pixhawk flight controller. It is not specificly a good choice to use the Raspberry Pi as a companion computer. Raspberry Pis are cheap and fun to use but using raspbian may cause build problems in some packages in ROS.
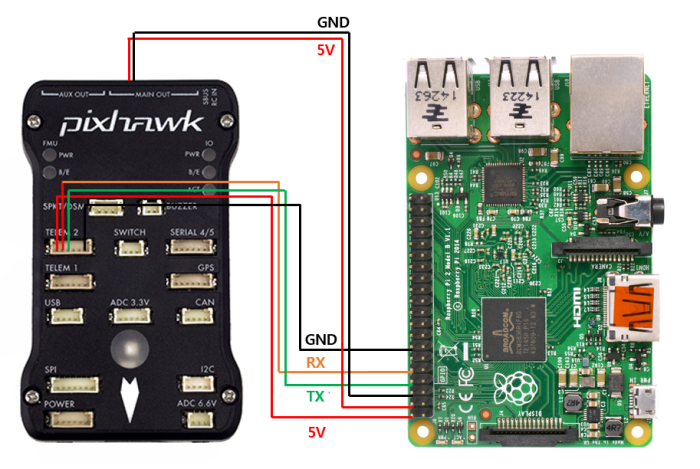
The companion computer is stacked on top of the flight controller. The TX/RX pins are connected to the TELEM2 port on Pixhawk. From the guide Raspberry Pi is getting power from the TELEM2 port but the Raspberry Pi was keep turning off as the 5V bus on the TELEM2 port was not providing enough current. Thus, the power is provided from the 5V bus on the servo rail which is powered by a UBEC from the ESC. Powering Raspberry Pi through GPIO is not recommended as there are no regulator or backward protection. However, As I am powering the Raspberry Pi through a UBEC, it is safer.
A 5.4 wifi dongle was used for network connections.
Software configuration

PX4 configuration
As the Raspberry Pi UART port only supports upto 57600 bps, the baudrate of the SYS_COMPANION parameter should be set accordingly. This is different with using the FTDI. This degrades the performance of the OFFBOARD control capabilities, but as the example on this article covers only setpoint position messages, 57600bps is enough to do the job.
SYS_COMPANION 57600
ROS configuration
Ubuntu 14.04 was used for the OS as there were some build issues using Raspbian Jessie. Ubuntu officially supports raspberry Pi, so the image was used on the raspberry Pi.
ROS indigo was used in this project. This was a decision made from the fact that ubuntu 14.04 and ROS indigo on raspberry pi was tested in a previous example.
MAVROS configuration
The name of the UART port on Raspberry Pi 2 is ttyAMA0. This should be configured in the launch file.
fcu_ur:=/dev/ttyAMA0:57600
To test run a mavros node without making a launch file you can use:
ronrun mavros mavros_node _fcu_url:="/dev/ttyAMA0:57600"
You can check if the connection with the flight controller is properly done using rostopic tools such as:
rostopic echo /mavros/imu/data
This command echos the imu data from the flight controller and prints it on the screen.
Trajectory Publisher node

The node is a simple publisher publishing position setpoints to the quadrotor.
#include
#include
#include
#include
#include
#include "math.h"
double r;
double theta;
double count=0.0;
double wn;
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise
("mavros/setpoint_position/local", 10);
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
nh.param("pub_setpoints_traj/wn", wn, 1.0);
nh.param("pub_setpoints_traj/r", r, 1.0);
// wait for FCU connection
while(ros::ok() && current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
ros::Time last_request = ros::Time::now();
while(ros::ok()){
theta = wn*count*0.05;
pose.pose.position.x = r*sin(theta);
pose.pose.position.y = r*cos(theta);
pose.pose.position.z = 15;
count++;
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
There are two parameters in the launch file which are the radius and the angular rate of the quadrotor. This can be configured from the launch file.
Operatimg the quadrotor
A field box is essential to take all the necessary equipment without forgetting something. The photo below is my go-to toolbox for field tests.

For operating a flight controller and a companion computer outdoors, it is convinient to configure a wifi network on the field. A wifi router is used to build a wifi network around a field which is powered by a 3S battery. A connector was built to connect the battery to the DCIn port to power a Wifi router.

I used putty for the ssh client for the Raspberry Pi. The basic operation procedures in running ROS is as follows.

First, the laptop should be connected to the same network as the raspberry pi is connected. Then, open a ssh session and run roscore:
roscore
Start a new session and run the launch file that has been configured. In this case:
rosrun modudculab_ros ctrl_traj_test.launch
For longer range applications, a more powerful router or antenna should be used. Using an ordinary wifi router outdoors seems to work well and simplify the operation process to make the system work.




Hi,
Thank you so much for creating these tutorials on how to setup OFFBOARD control on the actual hardware platform. There are not very many out there, with the details you have included.
I am trying to do something similar to what you did, but I am facing the issue where my copter does not receive the setpoint messages, I tried running a rostopic to see the topic but I can’t see the /mavros/imu/data topic. I am using an Odroid running ubuntu 14.04, connected on TELEM2, I can use mavproxy to intereact with my flight controller from the Odroid so I know the connection is working. Do you think you know what my issue could be ?
Thank you
LikeLike
You might have to check if the device name or address is correctly configured in your MAVROS node
LikeLike
Hi,
Any idea how to rotate the quadcopter using setpoint_position/local?
I tried ‘pose.pose.orientation = tf::createQuaternionMsgFromRollPitchYaw (0.0,0.0,3.14)’ to rotate it with 180 degrees, but instead the quadcopter just slowly drifts off.
Kind regards,
Michiel
LikeLike
The setpoint_position/local has a orientation in the pose message you can set the yaw using the quaternion included in the message
LikeLike
Indeed, that’s what i’m trying to do. I tried setting the yaw angle by creating a message with quaternions by using:
pose.pose.orientation = tf::createQuaternionMsgFromRollPitchYaw (0.0,0.0,3.14)’
But this just caused the drone to drift off while keeping its orientation at the same angle…
LikeLike
Did you set the setpoint position while setting the orientation?
It sounds like you only sent the setpoint of the orientation and not the position
LikeLike
Yes, I have set the position to (0,0,3). Position messages work, but orientation doesn’t
LikeLike
tf::createQuaternionMsgFromRollPitchYaw() function returns a Quaternion; not a single angle.
(http://docs.ros.org/api/tf/html/c++/namespacetf.html#a66cb77b973c0db55c3ab8bbee4ac781b)
and as per : http://docs.ros.org/api/tf/html/c++/classtf_1_1Quaternion.html#details
Quaternion = (const tfScalar &x, const tfScalar &y, const tfScalar &z, const tfScalar &w)
So, If I am not wrong it looks like you’re trying to assign a Quaternion to a variable which is supposed to have a single angle value and may that’s the problem
LikeLike
Hi, Thanks for the tutorial. Other than Raspberry Pi which companion computer would you suggest?
LikeLike
Everything that can run Linux and has a USB port should be okay. It should depend on the computational load you are looking for: for computationally intensive tasks nvidia Jetson tx1 or Intel nuc seems to be a nice choice. other small sbc could be an odroid is a nice choice
LikeLike
Great job! I am doing the same thing, with ROS Kinetic on a rpi3.
I have entirely built my drone, manually the flying is perfect, but with autonomous mission, the drone is not able to takeoff correctly… It arms, takeoffs on about 5 centimeters then lands by drifting away. Do you have any idea about this issue guys?
LikeLike
Hi,
Congrats, the article is very well written and detailed.
I am actually trying to achieve something similar, i have the following setup:
PX4 is connected to a companion computer (NanoPi Plus neo2 running ubuntu). I want to be able to comunicate via ROS from a ground pc to the companion pc using a serial Interface instead of a Wifi Router (so that in the future i can use a dedicated wireless protocol).
I tried to launch “roslaunch mavros px4.launch fcu_url:=/dev/ttyUSB0:921600 gcs_url:=’/dev/ttyS0′” on the companion pc and runned QGC on the “ground pc”. On the nanoPi i was able to see px4 data, on ground pc nothing.
Could you help me?
Thanks in advance,
Claudio
LikeLike
Thank you for the kind words. Have you listened to the serial interface you have defined as the gcs_url? I suspect you not having set the baudrate will result in a baudrate mismatch
LikeLike
Hi, I am a super noob to the use of ROS for drone control and would like to seek advice.
I am trying to implement a computer-vision-based navigation algorithm on a pixhawk 2.1 drone.
The image processing is done on a raspberry Pi 3B running Stretch Lite
1) Is it necessary to send messages via the ROS ? If my CV algorithm can generate position error signals , then why can’t I just simply feed those signals directly into the roll/pitch/yaw/inputs of the pixhawk flight controller?
2) I have seen online guides that cover how to connect the hardware between Rasp Pi and Pixhawk but couldn’t find any guide that deals with what exactly is the command to send from Pi to Pixhawk , for example to turn, rotate , fly forward ? Would you be able to enlighten me please? Thank you.
Regards,
KH
LikeLike
1) You can send whatever setpoints suits your usecase
2) You can follow the instructions in https://dev.px4.io/master/en/ros/offboard_control.html
LikeLike
Hello, I want to konw how does the drone know the local pose, from the imu or gps? And how can I use the mavros topic “mavros/local_position/pose” to get the parameter?
LikeLike
@YCH188 There is a EKF running in px4 which uses the sensor information that is coming from gazebo
LikeLike
Hello, I want to know how does the topic /mavros/setpoint_position/local control the UAV, if I want to use camera for local pose and publish it to /mavros/vision_pose/pose, should I publish setpoint to /mavros/setpoint_position/local or other topic to control the flight.
LikeLike
Hi! Appreciate your detailed article first!
You mentioned that TELEM2 port was not providing enough current so that Raspberry Pi kept turning off. I used same configuration as you did but with TELEM2 powering Raspberry Pi. Same turn-off problem didn’t happen, does this mean that TELEM2 is able to provide enough current now ?Maybe some improvements has been developed on hardware design.
Thanks in advance.
LikeLike
Hi
I want to know If i use my laptop and conect to telemetry , i can make drone fly like your with rasberry ??
LikeLike