A multirotor platform that can robustly maintain its attitude and control precise positions can be used as a low altitude science platform. The multirotor was developed to maintain it’s position while flying up to 4kg of payload. In this project we demonstrate a mission profile by an autonomously controlled multirotor moving in a fixed GPS location with varying altitude.
Results

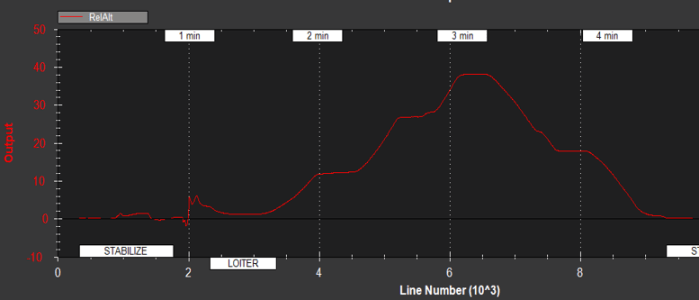
We could see that the multirotor can maintain it’s postion steadily within submeter precison while varying the altitude.